
20 Dic La validazione metrologica del dispositivo
 La pedana stabilometrica misura la reazione al suolo (GRF = Ground Reaction Force) esercitata attraverso le piante dei piedi per bilanciare la coppia che ci farebbe cadere.
La pedana stabilometrica misura la reazione al suolo (GRF = Ground Reaction Force) esercitata attraverso le piante dei piedi per bilanciare la coppia che ci farebbe cadere.
GRF è la risultante delle pressioni misurate sui quattro punti di contatto posti negli angoli della pedana.
Ogni cella di carico “legge” una forza che è inversamente proporzionale alla distanza dal punto di applicazione della GRF, normalmente definite Centro di Pressione (COP = Centre of Pressure).
L’elettronica della pedana calcola la posizione istantanea del COP a partire dalle letture fornite dalle celle di carico. Calcolando ad alta frequenza (nel caso di ArgoPlus 100 volte al secondo) le successive posizioni del COP il sistema può tracciare ed analizzare la traiettoria seguita dal COP durante l’esecuzione del test. Dalla analisi si ricavano infatti i parametri usati per la valutazione della funzionalità nel mantenimento dell’equilibrio in stazione eretta.
Il background scientifico del test di Romberg, nato nella prima metà dell’800, è molto solido ed ampiamente utilizzato in clinica. Anche da ciò nasce il requisito per la affidabilità e precisione dei parametri forniti dal test di Romberg strumentato su Pedana di Forza1.
Nonostante gli oltre 200 anni di applicazione clinica, alcune modalità e condizioni sono ancora discusse (posizione del corpo e dei piedi, durata del test, condizioni ambientali, etc.) e i valori di normalità dei parametri tradizionali2 presentano una distribuzione statistica talmente ampia da rendere spesso difficile l’interpretazione diagnostica. Tanto più oggi che l’evolvere delle tecnologie dei dispositivi e del loro software offrono parametri nuovi3 che sembrano confermare il superamento dei parametri tradizionali.
Il fatto che molti produttori di pedane propongano propri range di normalità parrebbe inoltre potersi ascrivere, almeno in parte, alla insufficiente validazione metrologica di tali dispositivi.
Consapevole di ciò Fremslife ha previsto una sequenza di test atti a garantire una adeguata accuratezza metrologica ai dispositivi ArgoPlus. Viene infatti verificata:
- La precisione statica e la linearità della misura di peso delle quattro celle sovrapponendo pesi campione su ogni cella (almeno 5 valori) e
a. confrontando i valori misurati con quelli corrispondenti alle masse applicate;
b. controllando la linearità della retta di regressione. - La precisione statica nel calcolo del COP posizionando un carico di prova (10<P<30 Kg) su almeno 5 posizioni della pedana;
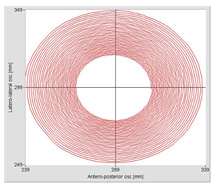
- La precisione dinamica nella traiettoria del COP attraverso l’impiego di un particolare attrezzo capace di generare una traiettoria spiraliforme convergente ad un cerchio: l’analisi della traiettoria consente di individuare anisotropie e scostamenti in un moto circolare a frequenze dell’ordine dei pochi Hz.
 Il dispositivo, denominato ACCUSTAB® è stato originariamente concepito presso il Dipartimento di Informatica, Sistemistica e Telematica DIST dell’Università di Genova4, 5 e viene impiegato, come detto, nei test finali di ArgoPlus.
Il dispositivo, denominato ACCUSTAB® è stato originariamente concepito presso il Dipartimento di Informatica, Sistemistica e Telematica DIST dell’Università di Genova4, 5 e viene impiegato, come detto, nei test finali di ArgoPlus.
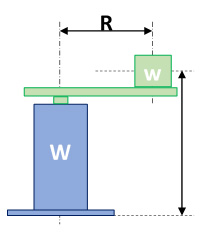
Si tratta di un cilindro (Ø 150 mm) riempito di pallini di piombo (peso totale 30 Kg) (W) su un piano di appoggio che viene posata sulla superficie della pedana da sottoporre a test. Un perno passante imbullonato sulla piastra di base e sul coperchio, riceve, attraverso appositi cuscinetti, un braccio rotante eccentrico sulla estremità del quale può essere caricata una massa variabile (w).
Il braccio esercita quindi una coppia ribaltante caratterizzata dalla massa e dalla sua distanza dall’asse di rotazione (R).
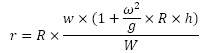
Quando il braccio ruota a velocità nulla la traiettoria è un cerchio in quanto la pressione risultante come somma vettoriale della massa della massa statica (al centro) e della massa rotante con braccio R. Il raggio di rotazione osservato sulla traiettoria sarà:
![]()
Quando il braccio rotante viene lanciato ad una velocità angolare (ω) ≠ 0 la relazione che consente di calcolare il raggio della traiettoria del COP sarà modificata dalla forza centrifuga:
![]()
esercitata alla altezza (h) del Centro di Massa del braccio rotante carico e diventerà:
La traiettoria del COP attesa può essere calcolata con precisione poiché la variabile velocità di rotazione (ω) può essere misurata (differenza temporale fra i valori massimo e minimo di ognuna delle due coordinate) durante la rotazione del braccio. Sarebbe perciò possibile calcolare l’errore istantaneo e l’errore cumulato su una durata comparabile a quelle del test clinico. E’ tuttavia sufficiente confrontare le escursioni sulle due coordinate (Valmax – Valmin) e fare il rapporto fra le due escursioni: tale rapporto dovrà essere molto prossimo all’unità. Il test dovrebbe essere ripetuto a diverse velocità di rotazione nella banda compresa fra 0,1 e 1 giro/sec dandone evidenza attraverso il calcolo della Analisi Armonica.
CONCLUSIONI
Si deve concludere l’urgenza di una definizione dei requisiti di misura da parte delle Autorità Regolatorie in modo da poter richiedere ai produttori di questa classe di dispositivi la introduzione di procedure di verifica standardizzate della accuratezza metrologica. Da ciò segue anche che:
- Tutte le pedane stabilometriche usate ai fini di valutazione diagnostica devono essere certificate come Dispositivo Medico in Classe I “con funzioni di misura” da parte di Ente Notificato;
- Nel rapporto finale di collaudo deve esserci il test di accuratezza statica e dinamica per il range di peso paziente considerato;
- I parametri di accuratezza, periodicamente verificati, devono accompagnare il dispositivo lungo la sua vita operativa;
- Nel referto diagnostico, conformemente alla buona pratica di Assicurazione della Qualità, dovrà essere fornita informazione della accuratezza misurata completa della data di verifica6.
Riferimenti bibliografici
¹ There are just two indications of reference standards: the one proposed by Bizzo G, Guillet N, Patat A, Gagey P. Specifications for building a vertical force platform designed for clinical stabilometry. Med Biol Eng Comput. 1985;23:474-476 and the draft pro-posed by the Japanese Industry Standards JI. Stabilometers. 1987 [cited 2015 10/10/2015]; Available from: http://ada-posturologie.fr/JIS_Stabilometers-j.pd
² Nieschalk M, Delank KW, Stoll W, Quantitative evaluation of the Romberg test Laryngorhinootologie vol 74(8), pp 489-494, 1995 e Gagey P.M. Weber B. Posturologia. Regolazioni e perturbazioni della stazione eretta Ed. Marrapese, 1997, Roma
³ Baratto L, Morasso P, Re C, Spada G A new look at posturographic analysis in the clinical context: sway-density vs. other param-eterization techniques. Motor Control vol 6, pp 248-273, 2002
⁴ P. Morasso et al. A testing device for the verification of the accuracy of the COP measurements in stabilometric platforms Gait Posture, vol 16, supp 1, pp S215-S216, 2002
⁵ Morasso PG, Re C, Casadio M. Spot check and recalibration of stabilometric platforms. Technol Health Care. 2004;12(4):293-304
⁶ J. Browne, N. O’Hare A quality control procedure for force platforms Physiol Meas, vol 21, no 4, pp 515-523, 2000